|
|
***eniar.solarbotics.net/papers/sensor_design
These pages are currently under construction, as is Eniar. Check back often for changes.
Goal: Identify obstacles, and separate climable ones fron those to be avoided. (using 3 sharp IR ranges and multiple touch sensors)
Obstacle: It's just hard to do, dammit!
The task can be reassigned as: Identify objects taller than seven inches. A ranger positioned above the ground and parallel to it could see this easily, but it would als be in the way and make to whole robot unstable (unless it could fly, with wireless connection... ;) A touch sensor mounted at 8 inches would be ideal, but this would render the ranges pointless. So, it seems a single sensor solution is difficult. However, by using multiple sensors, it becomes more easy: the difference between a low mounted ranger and one mounted above 8" would easily see stairs travelling upwards. What about downwards? the front legs tilt backward to land slightly bhind the front end of the robot, allowing for a ringer to be positioned parallel to the ground in front ot the robot, able to see the difference between a step down and a ledge. Adding short touch sensors where the uppermost ranger is will give added protection, and should allow it to avoid most obstacles.
Summary: A ranger and touch sensors mounted above the maximum step height, in combination with a forward pointing ranger in lower down and a downwards facing sensor at the fron to the robot.

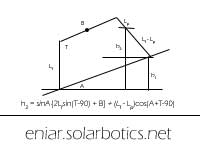
I drew this before I realized I needed to tweak the lower, forward facing ranger. This is basically it, though.
Things to think about: How to tell when climbing isn't working. |
|