|
|
***eniar.solarbotics.net/papers/front leg design
These pages are currently under construction, as is Eniar. Check back often for changes.
Goal: Unobstructed travel
#1 Obstacle: STAIRS
(Note: This page is all about my fight for hope that the robot will have the ability to climb stairs.I do not explain any of the diagrams or math clearly, and if you cannot comprehend any of it, it's beacuse I'm crazy. Knowing this, if you still need help, feel free to email me, at samthemagical @ cs.com
(remove all spaces before sending to this address))
A normal stair is between 6 and 7 inches tall. So, the walkers step height should max out above 7 inches.
The leg, walking, would look like this:
We add a couple lines, and do some trig to determine the step at a certain angle:
h = sinA[2lsin(T-90) + b]
To make a stair step probable, the leg height (l) would need to be nearly six inches and the step angle (A) would need to be 45° (This assumes, for asthetic reasons, making T=120° and b = l). At 45°, however, the walker would be on the verge of tipping over, and at six inches, the motors wouls barely be able to pull any weight. So, without some innovation, a small walker is unable to compete with stairs.
That said, many walkers (including the B.I.O. Bug) implement a jagged edge on their shins, to catch on to obstacles.
So, all that is needed is to take this one step further, putting many feet per leg:
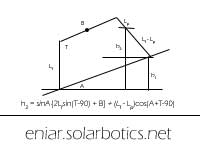
Then, making some additions to the earlier diagram:
h1 + h2 = sinA[2lfsin(T-90) + b] + (lf - lp)cos(A+T-90)
This equation, when the sum is 7", makes A = 30°, lf = 5", and lp = 1.25" (Again assuming T=120° and lf=b, as well as working with four evenly spaced feet per leg). These numbers are much more reasonable.
Now what is needed is a tilt in the third dimension of the leg, to allow for easy climbing:
Putting the tip angle at 30° gives Lt = 6.28" from the motor. Now, 3"-5" is the best range, so a little shorter would be good. Testing 20°, we get the total distance of 5.88", a good deal closer to the ideal. Trying once more at 15° (the least acceptable for an easy ascent) we gat a total of 5.74", which is not much of a difference, so 20° it is. The extra 10 degrees can be more than made up for by pushing the feet into a steeper angle. This puts the front legs to looking like this:
A leg that needs only to tilt 30° to ascend most stairs.
Written a week later:
worries of angle
burst briefly, brightly - my brain
solutions appear
I continually worry about that 30° angle; I think it might not step that high consistantly. I though tof a solution, though. I will add anoth foot ABOVE the bend in the leg, thus reducing the angle. PUtting a foot at the hight of the bend in the leg, 5 inches off the floor, gives a 26° angle. We'll see if that cuts it.
I'll get a sketch of this on soon.
Things to think about: Can these go downstairs, as well?
|
|